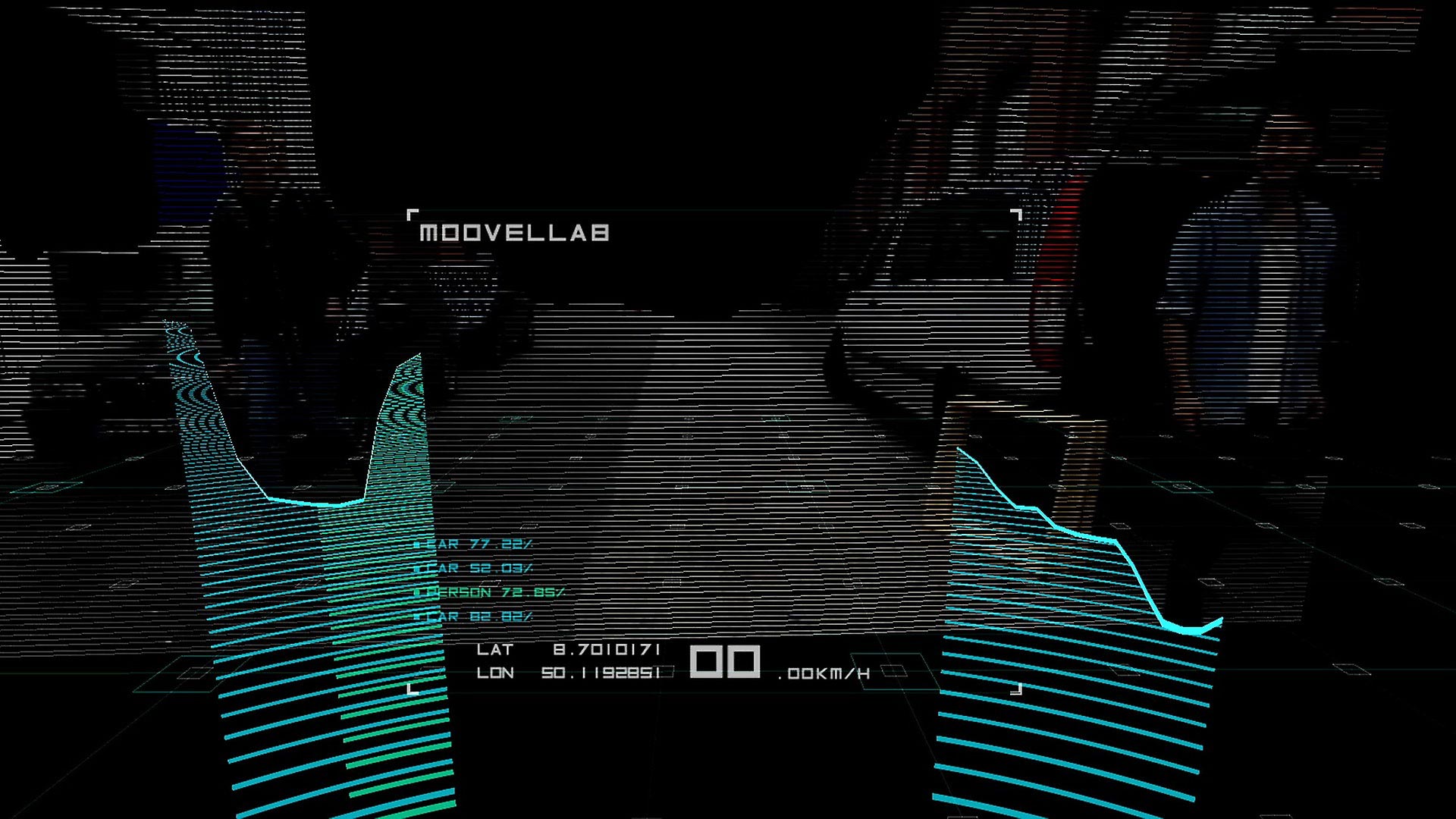
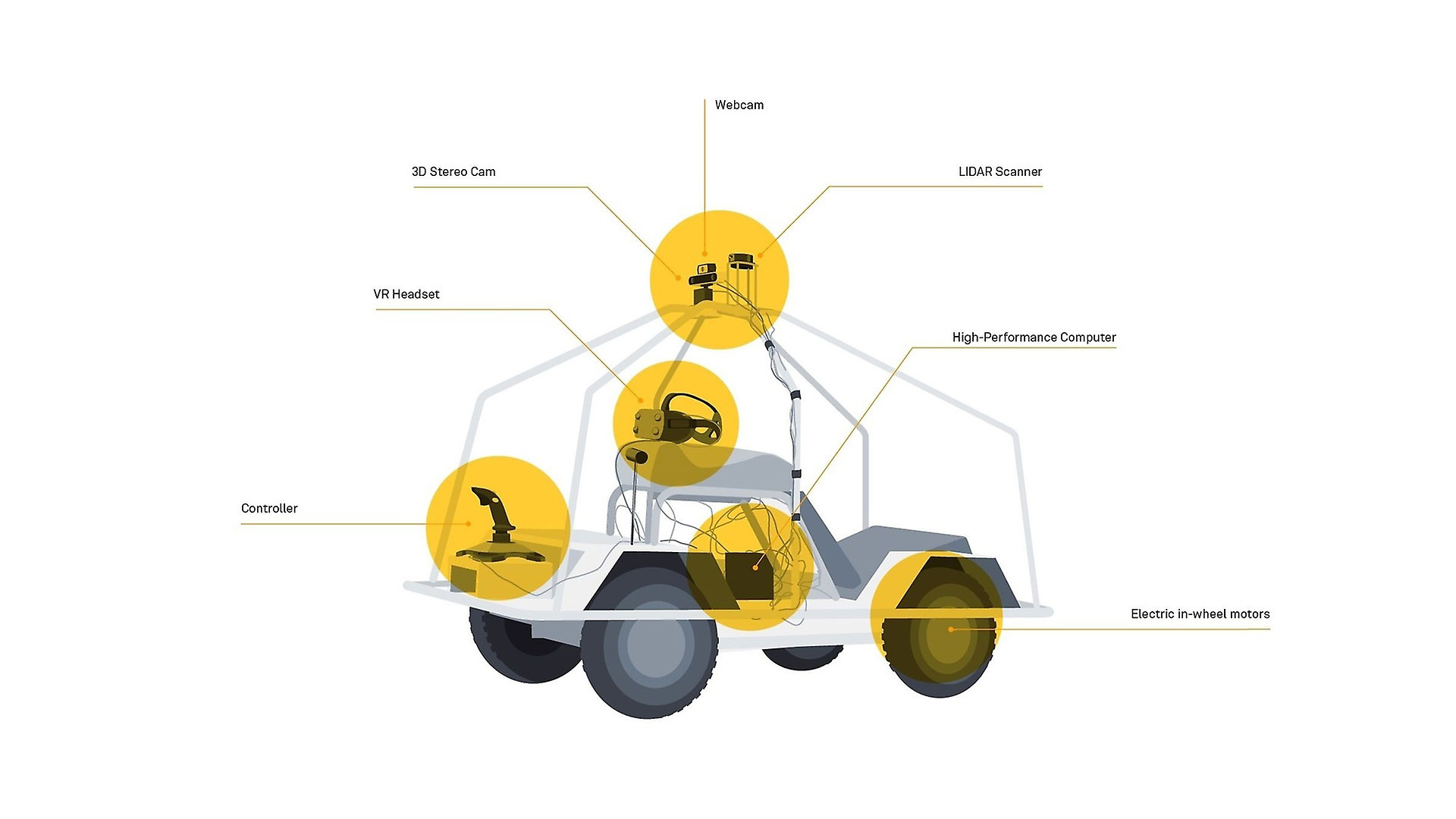
透過自動車的眼光看這個世界 - moovel lab 的最新計畫「誰想成為一輛自動車」讓這個夢想成真。彙整來自 3D 深度相機、LIDAR 掃描器和架設於非傳統車輛上各個感知器的資訊,並且在虛擬實境眼鏡上呈現。這項計畫將可在慕尼黑的 Push UX 會議以及比利時的 KIKK 大會上親身體驗。
自動車將如何改變我們的交通?自動車如何觀看其周遭環境?汽車、自行車騎士和行人等其他用路人會怎樣呈現?在車流中移動時,車輛需要使用哪些資訊?一輛由 moovel lab 加裝各式感知器與攝影機,造型奇異特殊的汽車將能解答這些疑問。這輛車會由使用者透過 VR 眼鏡控制轉向,裡面會顯示立體地圖以及物體辨識來協助引導駕駛人前進。使用者將扮演汽車控制單元的角色,就像是自駕車的電腦一樣。